Работа выполнена при поддержке гранта РФФИ, 14 01 00259 А
Известно, что смесительные устройства сельскохозяйственного назначения должны быть безвредными для здоровья людей и животных, перемешивать быстро и качественно, с минимальным повреждением частиц, с минимальными затратами на изготовление и эксплуатацию.
Однородную смесь сыпучих продуктов можно получить различными способами и с помощью многообразных устройств. Рабочие органы традиционных смесителей изготовляют из стали. При взаимодействии частиц смеси со стальной жёсткой поверхностью рабочего органа на поверхности частиц возникают микроповреждения, при скольжении слоя кормового материала по поверхности смесителя частички металла попадают на корм, что снижает его питательную ценность. Кроме того, стальные конструкции весьма громоздки, занимают много места и вызывают определённые трудности при транспортировании. Возможности современной химической и текстильной промышленности позволяют изготовить эластичные рабочие органы смесителя из химически нейтрального и экологически безопасного материала, поддающегося утилизации после использования.
Этих недостатков лишён смеситель с упруго-эластичными рабочими органами. Так как в «Толковом словаре русского языка» [1] термину «эластичный» соответствует «упругий и гибкий», «растяжимый», то будем использовать далее определение рабочего органа, выполненного из эластичного материала - «Эластичный рабочий орган», а смесителя, в конструкции которого имеются эластичные рабочие органы, - «Эластичный смеситель».
Для обеспечения смешивания в эластичном смесителе необходимо создать такие условия, при которых поверхность смесителя могла пульсировать, деформироваться, растягиваясь и сокращаясь подобно поверхности батута. При этом частицы смеси будут находиться в псевдоожиженном состоянии, в постоянном движении, перемещаясь друг относительно друга. Такое состояние не допускает возникновения центров сегрегации.
Эластичный, упруго-деформируемый рабочий орган предлагаемого эластичного смесителя, выполненный в виде цилиндрической оболочки, наилучшим образом отвечает этим требованиям, способствующим интенсификации процесса формирования однородных сыпучих кормовых смесей. Способность эластичных материалов сокращаться и растягиваться за короткий промежуток времени, выдерживая значительные знакопеременные напряжения, следует использовать для создания эластичных смесителей колебательного действия.
При падении частиц сыпучего тела на эластичную поверхность она вытягивается, за счёт своих физико-механических свойств, удлиняясь и накапливая потенциальную энергию. Деформация эластичной поверхности при ударном воздействии на неё частиц сыпучего тела позволяет рабочему органу накопить дополнительную потенциальную энергию. Накопленная за счёт деформации эластичного материала потенциальная энергия передаётся частицам сыпучего тела и преобразуется в кинетическую энергию ускоренного движения частиц [2]. Кроме сдвигового смешивания происходит интенсивное ударное взаимодействие частиц при их отскакивании от эластичной поверхности оболочки. Интенсификация процесса смешивания происходит за счёт эластичных свойств оболочки. При падении частиц на жёсткую поверхность видимых деформаций оболочки не наблюдается, и перемешивание частиц сыпучего тела происходит путём скольжения, сдвигового перемещения
С целью экспериментального изучения процесса приготовления сыпучих смесей была разработана и изготовлена лабораторная установка – смеситель сыпучих смесей сельскохозяйственного назначения непрерывного действия с эластичным рабочим органом. Схема устройства представлена на Рис. 9 на стр. 391. Работает устройство следующим образом. Засыпают через загрузочный патрубок в эластичный рабочий орган 7 компоненты смеси, включают привод 1 редуктора 2. Вал редуктора вращает коленчатый вал 3, который поднимает и опускает шатуны 4 и штоки 5 с хомутами 6, смеситель устанавливается из горизонтального положения в наклонное положение. При движении хомутов 6 участки эластичной цилиндрической трубчатой камеры совершают попеременное сложное движение: волновое в вертикальной плоскости и колебательное движение участков камеры в горизонтальной плоскости. При этом ход штоков выбран таким образом, чтобы за один оборот коленчатого вала первоначальное положение каждой входной части отсека камеры между штоками менялось от максимально возможного по высоте до минимально возможного, а положение каждой выходной части отсека камеры между штоками менялось от минимально возможного по высоте до максимально возможного.
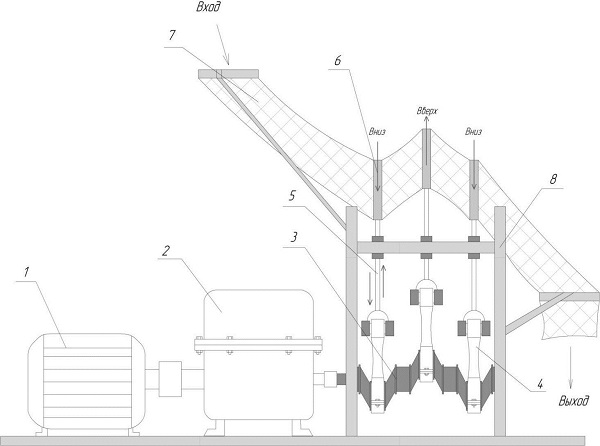
Рис. 9: Экспериментальный смеситель с эластичным рабочим органом.
Компоненты смеси совершают сложное движение. Частицы компонентов смеси движутся поступательно, циклически поднимаются и опускаются вместе с участками камеры, перемещаются колебательно в горизонтальной плоскости в свободных, незакрепленных в хомутах, участках камеры и переворачиваются друг относительно друга за счёт сил трения компонентов. Смеситель с эластичным рабочим органом 7 непрерывного действия, выполненный в виде цилиндра с кольцевым поперечным сечением, при работе совершает как колебательные волновые движения в вертикальной плоскости с подъёмом и опусканием участков камеры между соседними хомутами, так и горизонтальные колебания участков камеры, незакрепленных в хомутах. Эластичный рабочий орган и коленчатый вал закреплены на раме 8. Привод осуществляется от электродвигателя через редуктор. Готовая смесь выгружается через выгрузной патрубок эластичной оболочки. Дополнительно, устройство может иметь регулировку наклона эластичного смесителя к горизонту для сокращения времени смешивания и снабжаться пультом управления с пускателем перемешивающего устройства и таймером, регулирующим время работы смесителя.
Основные регулировки кинематических параметров режимов работы смесителя осуществляются следующим образом (Рис. 10 на стр. 392):
-
Регулировка угла наклона осуществляется изменением угла наклона всей установки относительно горизонта.
-
Коленчатый вал приводится в движение посредством цепной передачи. На конце коленчатого вала установлена совокупность ведомых звёздочек называемая – кассетой, при помощи которой и осуществлялась регулировка необходимой частоты вращения. На Рис. 11 показан орган регулировки частоты колебаний смесительной камеры.
-
Для регулировки амплитуды колебаний смесительной камеры необходимо открутить фиксирующий шатун болт и передвинуть его на необходимое расстояние от центра коленчатого вала (Рис. 12 на стр. 393).
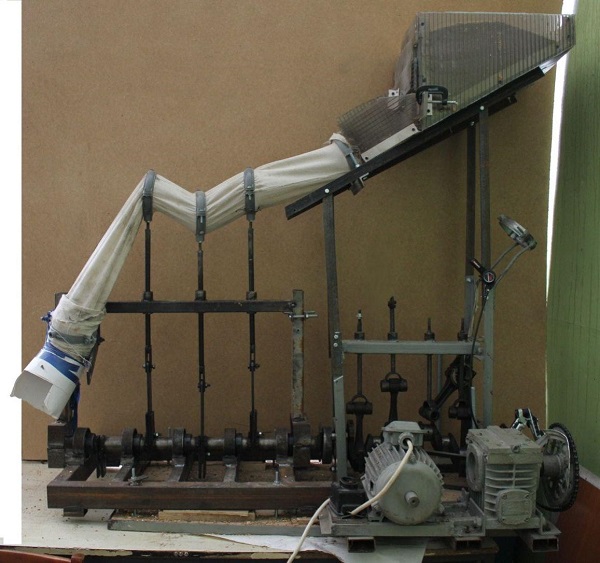
Рис. 10: Общий вид экспериментальной установки.

Рис. 11: Узел регулировки частоты колебаний отсеков смесительной камеры.

Рис. 12: Узел регулировки амплитуды колебаний смесительной камеры.
В 2014 г. теоретическая составляющая проекта «Гибридные нечётко-динамические модели слабо формализованных эластичных процессов и систем» была поддержана грантом Российского Фонда Фундаментальных Исследований (грант РФФИ № 14-01-00259 А). С декабря 2014 г. в исследованиях принимают участие студенты 2 го курса: Бондарев А. В., Малиновский С. В., Ваньков В. С., Цубера И. Г., аспирант Суханов А. В.
19.05.15 г. в ВЦ «ВертолЭскпо» г. Ростов-на-Дону состоялся Молодёжный инновационный конвент Ростовской области. В номинации «Лучшая инновационная идея» 1 е место было присуждено идее «Эластичные оболочки – эффективное средство получения многокомпонентных сыпучих смесей», представленной участником проводимых исследований Малиновским С. В. (http://www.talanty-dona.ru/news/show/920).
Для возможности дальнейшего промышленного проектирования, а также в целях усовершенствования и исследования процесса получения многокомпонентных смесей в эластичном смесителе была разработана конструкторская и техническая документация на смеситель с эластичным рабочим органом, выполнены чертежи устройства в среде Компас-График и разработана 3D-модель с использованием программ компании АСКОН (Рис. 14 на стр. 395). На сборочный чертёж имеется техническая документация.
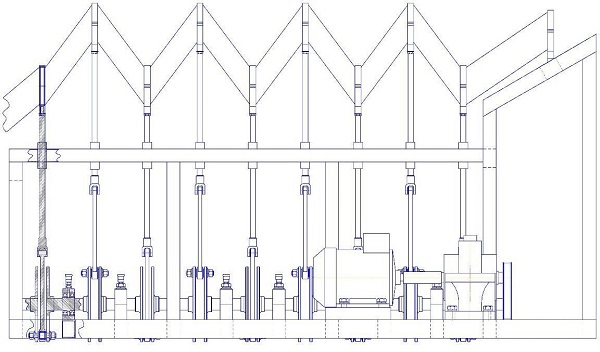
Рис. 13: Сборочный чертёж эластичного смесителя.
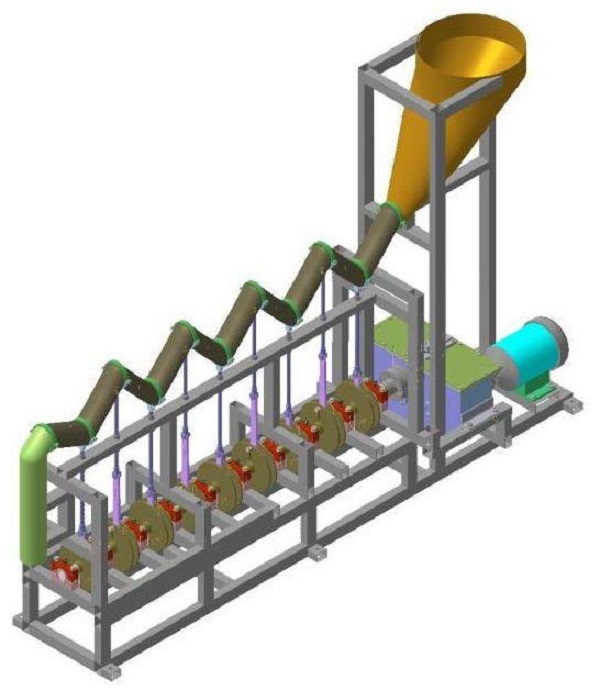
Рис. 14: 3D-модель эластичного смесителя.
Следующим этапом научно-исследовательской работы является создание реальной прототипа промышленной установки – «Гибридное эластичное устройство для получения многокомпонентных смесей сельскохозяйственного назначения».
Литература
-
Ожегов С. И., Шведова Н. Ю. Толковый словарь русского языка. / Ожегов С. И., Шведова Н. Ю. 4 е изд., доп. – М.: Азбуковник, 1997. – 944 с.
-
Суханова М. В., Останин К. А. Принцип работы эластичного смесителя конструкции АЧГАА. // Научные Труды Непрерывного Профессионального Образования. 2014. № 3. С.270-275.
-
Буторина М. В., Дроздова Л. Ф., Иванов Н. И. Инженерная экология и экологический менеджмент: Учебник / М. В. Буторина, Л. Ф. Дроздова, Н. И. Иванов и др. / Под ред. Н. И. Иванова, И. М. Фадина. – М.: Логос, 2004. – 520 с.
-
Макаров Ю. И. Аппараты для смешения сыпучих материалов. – М.: «Машиностроение», 1973. – 216 с.
Источник: Суханова М. В., Бондарев А. В., Малиновский С. В. Эластичные гибридные устройства для приготовления многокомпонентных смесей сельскохозяйственного назначения и их компьютерное моделирование // Научные труды Института Непрерывного Профессионального Образования. Выпуск шестой / Под научн. редакцией проф. С. В. Чернова. 2016. № 6. С. 197-207.